เครื่องบดแบบไฮดรอลิก สแตตติก ไดนามิค สต๊าเบิ้ล ภายใน เครื่องบดแบบไม่มีศูนย์กลาง FX-18CNC
คําอธิบายของอุปกรณ์:
1. ร่างและส่วนประกอบถูกโยนโดยเหล็กเหล็กเหล็กระดับสูงของมิลฮันนา FC30 ซึ่งได้รับการรักษาความร้อนแบบธรรมดาโดยวิธีประดิษฐ์มิตสุย เซกิ, TOSHIBA, ELB และอุปกรณ์ชั้นนําโลกอื่น ๆ เมื่อการแปรรูป clamping ขนาดความแม่นยําสามารถสูงถึงระดับไมครอน, เพื่อให้แน่ใจว่าความแม่นยําสูงอุปกรณ์ส่วนประกอบพื้นฐาน
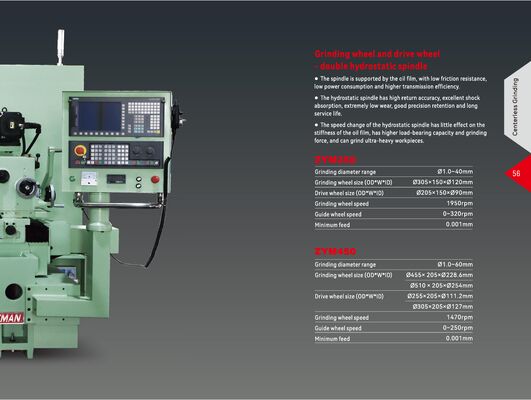
2. สปินด์ใช้สปินด์รองรับความดันแบบสแตตติกแบบสองแบบที่พัฒนาโดยตนเองด้วยการขัดเหลวที่บริสุทธิ์, ความต้านทานการขัดเหลวที่เล็ก, การบริโภคพลังงานที่ต่ําและประสิทธิภาพการส่งสูงระหว่างการทํางานปกติและการเริ่มต้นบ่อย, ไม่มีการสวมใส่ที่เกิดจากการสัมผัสโดยตรงระหว่างโลหะเกิดขึ้น, และความแม่นยําถูกรักษามีความสามารถในการแบกภาระที่สูง ภายใต้ความเร็วการเคลื่อนที่ที่เกี่ยวข้องต่าง ๆและการเปลี่ยนแปลงความเร็วมีผลกระทบเล็ก ๆ น้อย ๆ บนความแข็งแรงของหนังน้ํามันหนังน้ํามันมีหน้าที่ชดเชยความผิดพลาด, ซึ่งสามารถลดผลกระทบของความผิดพลาดที่เกิดขึ้นระหว่างแกนและยางเอง, และความแม่นยําของการหมุนของแกนสูง.
3.สปินด์ล้อปรับใช้ servo มอเตอร์ของแบรนด์ Delta, ด้วยความเร็วที่สามารถเปลี่ยนแปลงได้อย่างอิสระในช่วง 0-250 rpm (การควบคุมดิจิตอล),และความเร็วเส้นตรงที่ดีที่สุดและคงที่สามารถถูกรักษาแม้กระทั่งเมื่อกว้างของล้อการกํากับมีการเปลี่ยนแปลงเนื่องจากการสวมส่งผลให้คุณภาพการบดที่ดีที่สุด
เครื่องยนต์เซอร์โวถูกประกอบด้วยความฉลาดในตัวถือล้อควบคุม และขับเคลื่อนสปินเดิลโดยตรงผ่านเข็มขัดซินโครโนม โดยมีมุมคลุมเดียวกันกับล้อควบคุมเพื่อให้เข็มขัดทั้งสองคู่กันตลอดเวลาซึ่งสามารถหลีกเลี่ยงการสูญเสียความอ่อนแอ และความไม่สะดวกอื่น ๆ ที่นํามาโดยระบบการถ่ายทอดโซ่ประเภทเก่า ไม่มีโซ่หรือสปริงที่ต้องเปลี่ยนบ่อยเหมือนเดิม
4. น้ํามันหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนหมุนทําให้สะอาดและเปลี่ยนน้ํามันได้ง่าย. น้ํามันหมุนเวียนถูกกรองโดยอุปกรณ์กรองน้ํามันสองตัว และพร้อมกับเครื่องควบคุมความดันเพื่อให้แน่ใจว่าอายุการใช้งานของหมุนการทําความเย็นใช้ระบบทําความเย็นวงจรสองเพื่อให้แน่ใจว่าอุณหภูมิคงที่ของน้ํามัน spindle.
5.มันนํามาใช้โครงสร้างนํารถไฟฟ้าแบนคู่, 90mm กว้างรถไฟฟ้าแบนเลื่อน, แผ่นล่างถูกออกแบบด้วยช่องลอกการเติมน้ํามันโค้ง, ช่องทางการคืนน้ํามันย่อยถูกตั้งระหว่างพื้นผิวทาง,และสไลด์อาหารถูกครอบคลุมด้วยกาวทนทานการสกัด ซึ่งลดปริมาณสัมพันธ์การขัดแย้งมาก ลดการสกัดของพื้นผิวของรั้วมากปรับปรุงความแข็งแรงในการติดต่อทําให้ง่ายต่อการเปลี่ยนยางกันสวมสําหรับการสวมในภายหลัง และเพิ่มอายุการใช้งานพื้นที่ที่เรียบของเส้นทางทั้งหมดได้รับการรักษาความร้อนความถี่สูงเพื่อเพิ่มความทนทานการสวม.
6วงจรไฟฟ้าโดยรวมใช้ระบบไฟฟ้าของบริษัทฟูจิญี่ปุ่น มีการทํางานที่ดีและมีลักษณะสวยงามตู้ไฟฟ้าที่ใหญ่และสูงขึ้นสะดวกสําหรับการทํางานและรังสีความร้อน.
7โปรแกรม CNC ได้ถูกพัฒนาโดย Hotman และ HMI (Human Machine Interface) ที่มีปฏิสัมพันธ์การให้อาหารล้อเป็นแกนหนึ่ง และ CNC form dressing เป็นแกนที่สองมีความสอดคล้องที่ดีระหว่างเครื่องยนต์ servo และแกน และการให้อาหารล้อมีความแม่นยํา
|
ไม่ ไม่
|
รายการ
|
หน่วย
|
รูปแบบ ZYM450
|
|
1
|
กว้างการบด
|
mm |
Φ 1-60 |
|
2
|
ขนาดล้อเลื่อย (OD*W*ID)
|
mm |
Φ455x205xΦ228.6 |
|
3
|
ขนาดวงล้อควบคุม (OD*W*ID)
|
mm |
Φ255x205xΦ111.2 |
|
4
|
ความเร็วของสปินด์ล้อบด
|
RPM |
1470 |
|
5
|
การควบคุมความเร็วของหมุนล้อ
|
RPM |
0-250 |
|
6
|
เครื่องยนต์หมุนหมุนล้อบด
|
KW |
18.5 |
|
7
|
เครื่องยนต์หมุนหมุนล้อควบคุม
|
KW |
3 |
|
8
|
เครื่องขับเคลื่อน servo
|
KW |
2.4 |
|
9
|
มอเตอร์เซอร์โวส
|
KW |
1.0*2 |
|
10
|
มอเตอร์ขับปั๊มไฮดรอลิก
|
KW |
0.75 |
|
11
|
มอเตอร์ขับปั๊มเย็น
|
KW |
0.37 |
|
12
|
วงล้อปรับปรุง การให้อาหารวงล้อมือ
|
mm |
3.5/rev., 0.05/g
|
|
13
|
การควบคุมวงล้อมือที่หมุนดี
|
mm |
0.1/rev., 0.001/g
|
|
14
|
ล้อมือที่ให้อาหารโต๊ะทํางาน
|
mm |
ขั้นต่ําการให้อาหาร |
|
15
|
โต๊ะทํางานล้อมือหมุนละเอียด
|
mm |
0.2/rev., 0.001/g
|
|
16
|
ล้อมือใส่อาหาร
|
mm |
2/ rev., 0.01 / กรัม
|
|
17
|
มุมมักของล้อควบคุม
|
กรด |
+5°-3° |
|
18
|
มุมกลับของล้อควบคุม
|
กรด |
± 5° |
|
19
|
ขนาดเครื่อง (L*W*H)
|
mm3 |
450 × 1200 × 2000 |
|
20
|
น้ําหนักของเครื่อง |
กิโลกรัม |
ประมาณ 3500 |
รายละเอียดของ Hotman (ล้อบดขึ้นอยู่กับวัสดุส่วน)
|
ไม่ ไม่
|
วิธีการบด
|
ส่วน
|
ความกลม
|
ความหยาบคาย
|
| 1 |
ผ่านการบด
|
ส่วนมาตรฐาน
|
≤ 0.001mm |
≤Ra01 |
| 2 |
ในการบด ((Press)
|
ส่วนมาตรฐาน
|
≤0.002mm |
≤Ra02 |

 ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!
ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!